글
ROS 사용기 - (3) ROS Industrial
Robot Teaching SW를 개발하다보니, ROS의 사용을 통해 훨씬 좋은 결과를 활용할 수 있음을 알게 되었고
그러다 또 찾은 것은 이미 이를 산업 현장에 적용하고자 노력하는 컨소시움이 형성되어있음을 알 수 있었다.
그 이름은 바로 ROS Industrial.. 2012년 1월에 SW는 GoogleCode에 공유 되었고(현재는 GitHub),
2013년 3월에 Shaun Edwards에 의해 ROS Industrial 컨소시움은 출범한다.
ROS Industrial의 기원은 이런 곳에서 출발한다.
" 산업용 로봇 시장은 매우 커졌지만, 아직 수행하는 Task의 종류는 몇 가지로 한정되어 있다. 20년간 많은 연구비가 새로운 Task의 연구를 위해 투자되었지만, 연구실에서 연구한 내용은 실제 현장에 적용하기 어렵다. 우리는 연구실의 연구 내용을 실제 현장에 적용할 수 있는 방법을 제공하고자 한다. "
아래의 Youtube 영상을 보면 내가 하고자 하는 것들의 현실에 대해서 파악할 수 있었다..!!
https://www.youtube.com/watch?t=225&v=xenFvis_iVc
https://www.youtube.com/watch?v=GoAS9bmlenA
https://www.youtube.com/watch?v=Ek8GKqmJ7n0
https://www.youtube.com/watch?v=5zO46F1xEzk
https://www.youtube.com/watch?v=eMlGV94c5WU
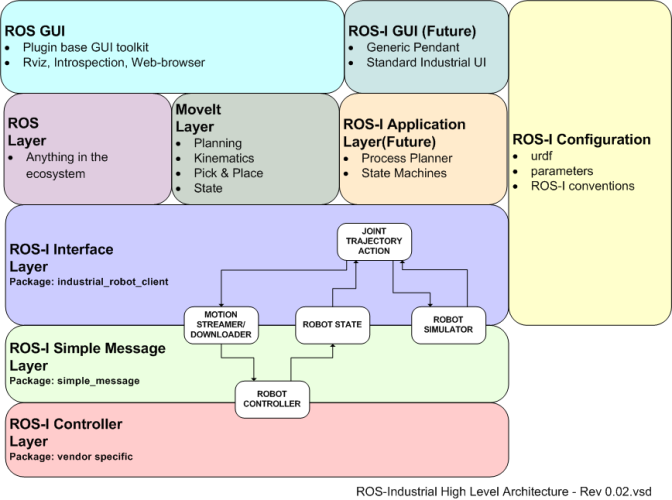
ROS Industrial의 구조..
그리고 내가 연구하기에 좋은 staubli 에 관련된 SW 내용은
http://wiki.ros.org/staubli
에서 찾아볼 수 있다!
(두*로보틱스에서 원하던 Calibration 관련 기능의 단서를 Industrial Calibration package(에서 얻을 수 있지 않을까!?! http://rosindustrial.org/videos/#Industrial Calibration Library )
트레이닝은 (http://aeswiki.datasys.swri.edu/rositraining/indigo/Exercises/) 에서 하자!
* Ref
[1] http://rosindustrial.org/
'Research' 카테고리의 다른 글
| ROS 사용기 - Eclipse 설치하고 desktop launch 설정하기 (0) | 2015.07.23 |
|---|---|
| ROS 사용기 - rosbag으로는 teaching data를 playback할 수 없다. (0) | 2015.07.22 |
| ROS 사용기 - (4) ROS Industrial Tutorial (0) | 2015.07.17 |
| ROS 사용기 - (2) ROS 설치 (0) | 2015.07.13 |
| ROS 사용기 - (1) Linux 설치 (0) | 2015.07.12 |
